im Zuge der Konstruktion von elektrischen Antrieben für mein Modell eines Märklin-Portalkrans tauchte die Frage nach den Übertragungswirkungsgraden verschiedener Antriebskonzepte auf.
Vielleicht ist dieser Bericht für den einen oder anderen Schrauber von Interesse
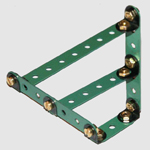
Zur Messung habe ich die verwendeten Kombinationen von Schneckengetrieben mit Zahnrad-Übersetzungen in einem Aufbau mit einer Möglichkeit zur Ermittlung der Abgabe-Drehmomente nachgebildet. Verwendung findet der klassische "Pronymsche' Bremszaum" in Verbindung mit einer digitalen Briefwaage (Fotos). Die Wirklänge der Hebelarme beträgt 10 cm. Zusätzlich habe ich das vom verwendeten Motor 1071 abgegebene Drehmoment an der Abtriebswelle aus den elektrischen Größen errechnet und zudem ebenfalls mittels Bremszaum gemessen.
Die Lagerungen sind so ausgeführt, dass unnötige Reibung vermieden wird (Beilagscheiben, Kardangelenke). Die jeweils nicht gemessene Abtrieb kann durch Lösen der Bremse bzw. durch Lösen einer Stellschraube ganz vom Antrieb getrennt werden
Ernüchternd war zunächst der ermittelte fast unglaublich schlechte Wirkungsgrad des Märklin-Schneckenantriebes von unter 10 %
Etwas zu den Messwerten:
Alle Messungen können infolge auch des einfachen Aufbaus nur eine Genauigkeit von + / - 10 % beanspruchen.
Der an sich recht leichtläufige Märklin-Motor 1071 (1321) benötigt bereits im Leerlauf (am Trix-Trafo mit 14 V AC) fast 400 mA für den Eigenwiderstand. Spannungsverluste u.a. durch den Innenwiderstand kommen hinzu.
Bei einem Nennstrom von 700 mA gibt er an der Welle ca. 1,7 Ncm Drehmoment ab.
Dies passt gut mit den elektrischen Daten zusammen, aus denen sich eine Drehmomentkonstante kT = 6 Ncm / A - bezogen auf 1.500 rpm errechnen lässt.
(Nebenbei, der Märklin 1072 / 1322 gibt etwa 2,4 Ncm bei 3.000 rpm und 1 A ab).
Rechnerisch wären demnach an der Messwelle nach Übersetzung von 25 :1 (Schnecke) und 57 / 25 (Stirnzahnräder) von i = 57 wenigstens 20 Ncm zu erwarten. Weit gefehllt
Ergebnis:
Zwischen den unterschiedlichen Anordnungen mit schnelldrehender Schnecke und Zahnradgetriebe im Anschluss sowie umgekehrt erzielen das gleiche Ergebnis ohne signifikante Abweichungen
Da die durch Reibung verlorene Leistung M reib x n (des Schneckengetriebes) unabhängig von der Reihenfolge der Anordnung ist, so ist das Ergebnis auch schlüssig.
Am Kranmodell verbleibt ein auch für den Fahrantrieb hinreichendes Drehmoment. Ein Versuch mit einer dreistufigen Kombination aus Kronenrad- und Stirnradgetriebe werde ich dennoch durchführen und darüber berichten.